本文说明为何使用磁性传感器以及它们能解决什么样的问题。概述了磁性传感器的应用环境和所使用的磁性传感器。本篇描述了三个典型测量的磁场范围远大于地球(磁场相似于地球磁场和远小于地球磁场以及每个磁场范围最适用的传感器型号讨)。论线圈磁通量闸门、霍尔效应传感器、磁阻和巨磁阻磁性传感器的工作原理、介绍磁性传感器的优缺点以及已认证的产品应用。
作者 和: TAMARA BRATLAND ROBERT BICKING BHARAT B. PANT
磁性传感器为电流传感、接近传感、线性速率或转动速率传感,定向磁异态检测,角度、位置或位移测量等许多传感方面的问题提供了独特的解决方案。了解磁性传感器技术背后的概念和它们最合适的应用将有助于帮您决定选择的磁性传感器是否对您的应用有利。
磁性传感器用于检测磁场的存在,测量磁场的大小,确定磁场的方向或测定磁场的大小或方向是否有改变。磁性传感器可用于检测静止的或如汽车、卡车或火车等运动的铁磁物体;门或闩锁的关闭,如飞机货舱门:一个物体的位置,如键盘上的按键;如发动机中轴的旋转运动;一个物体的部位如阀轴或机械手;或者用于跟踪虚拟现实和运动控制等应用。
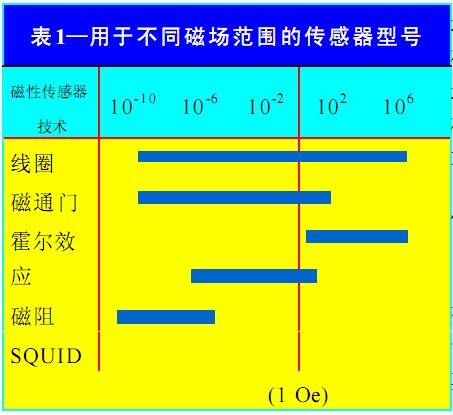
磁场测量可分为三个范围。在每个范围中,能在其环境中处于最佳工作状态的磁性传感器型号也不同。第一个磁场范围远大于地球磁场(如在永久磁铁或大电流附近)。其范围为 100 奥斯特(Oe) 或更高。第二个磁场范围约等于地球磁场或0.6 Oe 。第三个磁场范围远远小于地球磁场,它们在 1 mOe 或更低范围内。地球磁场常用作受铁磁物体干扰的背景磁场,如在磁异态检测中的铁磁物体。表 1 给出了用于不同磁场范围的传感器型号 。
何时使用磁性传感器?
极少的应用场合只需要一个磁场测量,更确切地说是将现有的或已建立的磁场用于感测其它信息。以下是几个实例: (1)电流传感,此处将载流线产生的磁场用于监控电路中的过负荷状态或蓄电池的状态;(2)定向,将地球磁场的两个水平分量用来计算相对于磁北的角度;(3)磁异态检测,此处将由铁磁物体产生的对地球磁场的干扰(如一个铁钉、金属螺栓、汽车、潜艇或地磁岩石)用来检测这些物体是否存在。一旦表现出有相同的干扰也能用来识别该物体的类型(如汽车实体或模型) 。
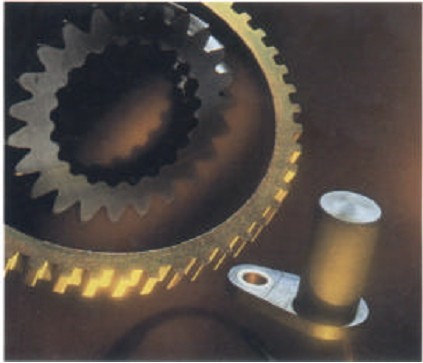
另一个例子是齿轮齿传感(图1),此处传感器与一块磁铁和齿轮齿的组合一起使用。齿轮齿或凹槽对磁铁产生的磁场有不同的干扰,就可将齿轮齿与凹槽辨认开来。这个数据可用于测量齿轮的转速。
磁性传感器,通常称为磁力计,有不同的物理原理和设计结构。下面我们将讨论各种磁性传感器中使用的不同技术。
线圈
线圈是最老式的磁性传感器之一。根据法拉弟定律,通过线圈的磁通量有任何变化都将导致线圈产生电动势,在时变磁场区中放置一个耦合线圈就可工作。通过改变磁场就能测量线圈中感应的电压。当穿过导电回路的磁通量有量的变化,这个回路中就会产生电压。感应的电压=磁通量变化/时间变化
线圈型传感器用于需测量变动场变化的应用场合。对这种原理有许线圈的一个常见多不同的实施方法。的应用是用来触发红绿灯信号的埋在道路中的电路回路。系统执行时线圈通常大而成本高。
磁通门
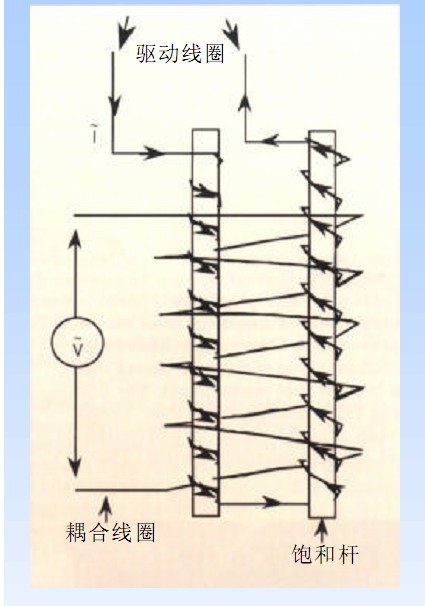
磁通门(图 2),同样基于法拉第定律,通常是用两个铁磁材料制成的杆,但也可以是用一次或二次绕组绕成的环或圈。这两个杆用一次绕组缠绕,以相反方向产生驱动磁场。频率在驱f 的交流电在一次绕组中流动动,在磁场的作用下两个杆的磁化作用处于相反方面。二次绕组测量。在未施加外部磁场时,假定两个杆和一次线圈是相同的,则在二次线圈里的净磁通量为零。这样在此线圈中就不会有信号产生。当沿着杆的轴线方向施加一个外部磁场时,其中的一个杆将先于另一个杆磁性饱和。磁通门的输出是驱动频率f的第二谐波。施加一个小磁场时,第二谐波的波幅与施加的磁场成正比。
磁通门可以在制造工艺上使其非常敏感,分辨率最低为 1 Oe。可以测量直流或交流磁场。频率的上限约为10 kHz与霍尔和磁阻传感器相比,它们的尺寸规格较大,价格也更贵。
霍尔效应传感器
霍尔效应传感器用于测
10 Oe至几千Oe的磁场强度,对于强磁场的测量最为理想 。在存在磁场的情况下,霍尔效应发生在载电流的金属或半导体中。最常用的霍尔效应传感器是硅型霍中尔传感器,其中信号调节电子器件被集成在芯片上。
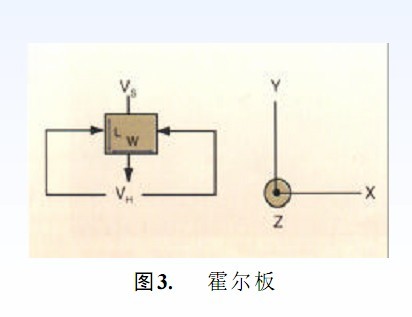
图 3 中所示为导电材料的矩形薄板,沿Y轴施加了一个电压VS,在板的霍垂直方向施加了一个磁场 B(沿 Z 轴),霍尔电压VH由下式求得VH= uH(W/L)BVs 其中uH是霍尔迁移,W是霍尔板的宽度,L 是长度。 由于洛仑兹力作用在用导电材料制成的电荷载体上而产生的霍尔效应等于:F=q(vB) 其中 q 是电荷载体上的电荷,v 是电荷载体的速度,B 是磁场,力使电流变形,并将其挤向导电板的一侧。这造成 X 轴上的等势线变,形导致产生霍尔电压。如果霍尔板的长度远大于宽度,则霍尔电磁场与洛仑兹力相平衡。电流变成与 Y轴平行。最实用的半导体霍尔元件一般来说是正方形。此时电流相对于励磁电压有一个角度。
硅片中霍尔效应的灵敏度约为7 V/V/Oe。由于硅是压敏电阻材料所以通过硅的封装而施加在霍尔元件上的应力会导致在机械和温度效应共同作用下的零位偏移误差。硅片中霍尔效应在百分之几到几千Oe 的范围内是呈线性,的可检测的最小磁场为 1Oe 的数量级。
霍尔装置的应用包括齿轮传感、旋转位置传感器和电流传感器。电流传感器如图 4 所示。在汽车业中使用的新型火花点火发动机有一个直接点火系统系统,内每个汽缸或每对汽缸都使用一个点火线圈,去除了分布器。内含有一个永久偏磁和一个霍尔效应传感器的齿轮传感器对曲轴和凸轮轴进行计时。使用两个廉价的铁质磁极片可制成一个旋转位置传感器,将磁性信号从旋转的磁棒送至霍尔传感器。带有凹槽的环形磁芯霍尔 IC 位于这个凹槽内, 可用来制成一个电流传感器。也可制成线性和数字输出传感器,其工作范围为 10A 至 1000A。霍尔装置的其它应用包括键盘开关、磁强计和位置传感器。
磁阻传感器
各向异性磁阻(AMR)发生在铁质材料中。如图 5 所示, 当施加的磁场垂直料中于用铁质材料制成的薄板中的电流时,它本身的电阻明显有变化。磁阻传感器传感沿着空间一个方向的磁场,在此模式范畴内,它们属于霍尔效应传感器和SQUID(超导量子干涉装置之间的传感器)。 SQUID 可测量小于 1 µOe 几个数量级的磁场。磁阻传感器通常用于测量µOe 到 10Oe 的磁场。
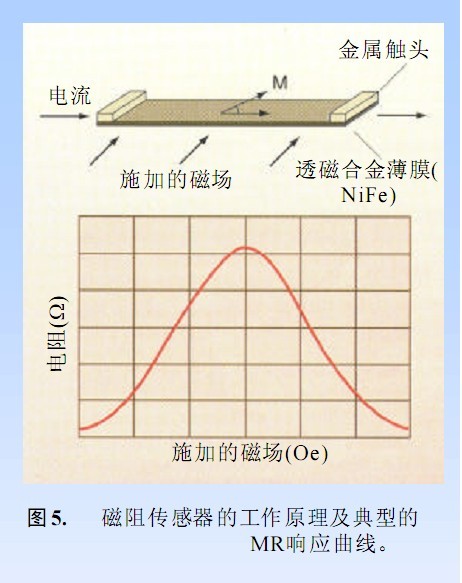
惠斯顿电桥是磁阻传感器的基础电气元件。图5说明了磁阻传感器的工作原理和一个MR板对外部磁场的典型响应。图6所示为用四个磁控电阻器制成的惠斯顿电桥带有一个供电电压Vb,致使电流通过电阻器。如图所示,施加一个偏磁场,使在所有电阻中的磁化强度和电流间有一个约45°的夹角。如果电阻器是同一种结构,则所有四个电阻器的电阻是相同的,正交施加磁场h的R.A,使两个反向放置的电阻器磁化而转向电流,使电阻有一个增量△R,在剩下的两个反向放置的电阻器中,由于磁化而转离电流,导致电阻减少△R 。
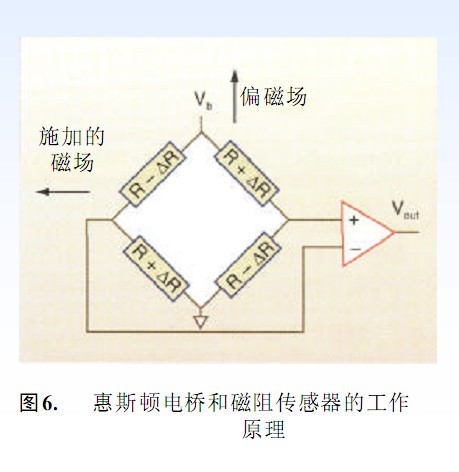
电桥输出为 △Vout=( △R/R)Vb。作为施加磁场函数的电桥输出 △Vout被称为传感器的传递函数。在线性区内,输出与施加的磁场成正比( △V=S h Vb)灵敏度S和传递函数的线性范围对于传感器来说是两个重要特征。传递函数的线性范围与灵敏度成反比 。
磁阻传感器是由一长条铁磁薄膜(如透磁合金、镍铁合金)制成的。用标准半导体技术将这些薄膜熔制在硅片上。板的厚度有几百埃(150-500),宽度为几十微米(10-50),长度从几百至几千微米 。
MR 传感器有下列属性,使它们在众多应用中都可选用 :尺寸小 。1.高灵敏度,使传感器可距被测铁磁物体一段较长的距离 。2.由于内阻抗小,使其对电磁噪声和干扰不敏感。3.由于是固态溶液,无转动部件,使它具有高度可靠性。 4.由于部件能方便地装入在插板产品中,而使实施成本降低。
MR 传感器(图 7),为异态检测提供高灵敏度和独特的解决方案,可根据物体的磁性信号的特征支持对物体的识别。这些特性可应用于检测如武器等的安全系统中,或用于在收费公路上对车辆进行检测。它特别适用于货币鉴别,跟踪系统,如在虚拟现实设备中,和固态电子定向罗盘中。与磁铁组合也可用于齿轮传感。MR 传感器可传感芯片平面内沿一个方向的磁场。这使其可与能传感沿芯片平面法向磁场的霍尔效应装置区别开来。这可使应用设计者以霍尔效应传感器无法使用的几何构型使用 MR 传感器,例如当需要一个薄型传感器时。需用一个或几个MR传感器的其它应用,包括机械手的位置和虚拟现实产品中盔的位置和定向。许多应用既可使用霍尔效应传感器也可使用MR传感器,但在需要低灵敏度,而较宽的线性范围时,应使用霍尔效应传感器;在要求高灵敏度时,则使用 MR 传感器 。

巨磁阻效应
巨磁阻效应(GMR)是最近才发现的现象,它基于电子通过数层叠层中,非常薄的铁磁层和非磁性层(25-50 埃)之间的界面散射,这是由于磁阻效应与上述 AMR效应相比显得大而如此命名。当两个相邻的铁磁层有反向磁化强度时,电阻要高于它们在同一方向上的磁化强度矢量。
GMR是由法国的 M. N. Baibich 等人在1988年发现的,已成为重大研究课程。通过新兴的 GMR 技术我们有希望制造出高灵敏度的小型传感器。迄今为止GMR 效应需要工作在高强度的磁场并伴有高分贝噪声,这使得它不能应用于大范围的传感器产品中。电阻变化所需的磁场变化需从10 Oe到几千Oe,而灵敏度尚未达到 MR 或磁通门装置的灵敏度。但正继续朝着开发更低磁场的方向发展。
参考文献
1. Scientific Honeyweller(霍尼韦尔科学) 8(1): 29-34页,1987年秋季版 Magnetoresistive Sensors (磁阻传感器),作者 Pant Bharat B. 。
2. Proceedings of the IEEE (电气和电子工程师协会学报) 78(6):973-989 页,1990 年 6月 A Review of Magnetic Sensors (磁性传感器回顾),作者 Lenz J. 。
3. Sensors and Actuators (传感器和执行机构) 10:127-140 页,1986 年 Magnetic Field Sensors Using the Magnetoresistive Effect (使用磁阻效应的磁场传感器 )。作者Dibbern U. 。
4. Journal Physics E: Scientific Instruments (物理电子杂志: 科学仪器 ) ,12:241-253页 ,1979年,The Fluxgate Magnetometer (磁通门磁力计),作者 Primdahl F.。
5. The Hall-Effect and its Application (霍尔效应和应用) ,Plenum 纽约 NY ,1980 年作者 Chien C.L.和 Westgate C.R. 。
6. Honeywell Scientific Magazine (霍尼韦尔科学杂志),1995 年 New Developments in Magnetoresistive Transducers and Sensors (磁阻变换器和传感器的新发展),作者Pant B. 。Cameron G. 和 Krahn D.
7. Institute of Physics Publishing (物理学出版学会) Bristol 1992 年 Thin Film Resistive Sensors (薄膜电阻传感器) 作者 CiureanuP.和 Middelhoek S.
8. IEEE Transactions on Magnetics (IEEE 磁学会报) 28(5):2482-2487 页 1992 年 9 月Giant Magnetoresistance: A primer (巨磁阻:入门) 作者 White Robert L.
9. 1994 年 9 月的 Sensors Expo Conference (传感器世博会议)上发表的论文 GMR: The Next Generation of Magnetic Field Sensors (GMR: 新一代磁场传感器) 作者 Daughton, Jim 和 Brown Jay
转载请注明来源:赛斯维传感器网(www.sensorway.cn)
文章出处:http://www.sensorway.cn/knowledge/4214.html
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
